

Les ingénieurs en mécanique de NAU développent une nouvelle technologie de muscle artificiel haute performance – NAU News
Dans le domaine de la robotique, les chercheurs recherchent en permanence les moyens les plus rapides, les plus puissants, les plus efficaces et les plus économiques pour actionner ou permettre aux robots d’effectuer les mouvements nécessaires pour exécuter les fonctions prévues.
La recherche de nouvelles et meilleures technologies d’actionnement et de la robotique «douce» est souvent basée sur les principes de la biomimétique, dans laquelle les composants de la machine sont conçus pour imiter le mouvement des muscles humains – et idéalement, pour les surpasser. Malgré les performances des actionneurs comme les moteurs électriques et les pistons hydrauliques, leur forme rigide limite leur déploiement. Alors que les robots passent à des formes plus biologiques et que les gens demandent plus de prothèses biomimétiques, les actionneurs doivent évoluer.
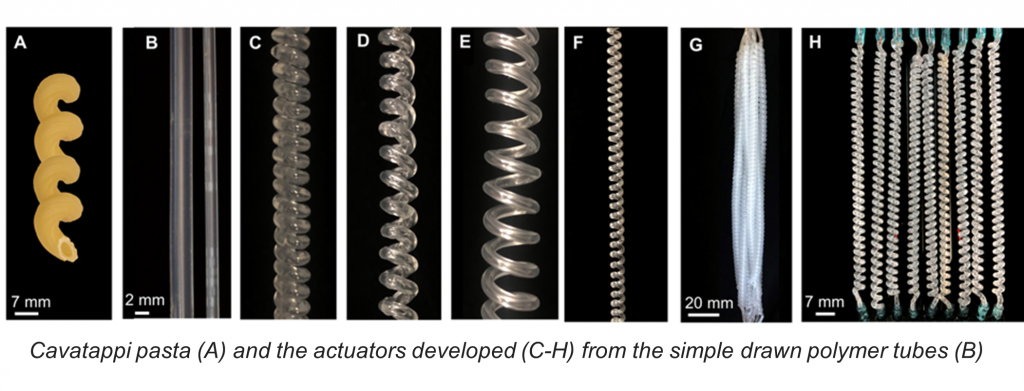
Professeur associé et ancien Michael Shafer et professeur Heidi Feigenbaum du département de génie mécanique de la Northern Arizona University, avec un étudiant-chercheur diplômé Diego Higueras-Ruiz, a publié un article dans Robotique scientifique présentant une nouvelle technologie de muscle artificiel de haute performance qu’ils ont développée dans le laboratoire des systèmes actifs dynamiques de NAU. L’article, intitulé «Les muscles artificiels Cavatappi issus du dessin, de la torsion et de l’enroulement de tubes polymères», détaille comment la nouvelle technologie permet des mouvements plus humains en raison de sa flexibilité et de son adaptabilité, mais surpasse le muscle squelettique humain dans plusieurs mesures.
«Nous appelons ces nouveaux actionneurs linéaires cavatappi des muscles artificiels en raison de leur ressemblance avec les pâtes italiennes», a déclaré Shafer.
En raison de leur structure enroulée ou hélicoïdale, les actionneurs peuvent générer plus de puissance, ce qui en fait une technologie idéale pour les applications de bio-ingénierie et de robotique. Dans le travail initial de l’équipe, ils ont démontré que les muscles artificiels cavatappi présentent des mesures de travail et de puissance spécifiques dix et cinq fois plus élevées que les muscles squelettiques humains, respectivement, et à mesure qu’ils poursuivent leur développement, ils s’attendent à produire des niveaux de performance encore plus élevés.
«Les muscles artificiels cavatappi sont basés sur des actionneurs en polymère torsadé (TPA), qui étaient assez révolutionnaires à leur sortie car ils étaient puissants, légers et bon marché. Mais ils étaient très inefficaces et lents à actionner car il fallait les chauffer et les refroidir. De plus, leur efficacité n’est que d’environ 2% », a déclaré Shafer. «Pour le cavatappi, nous contournons ce problème en utilisant un fluide sous pression pour l’actionner, nous pensons donc que ces dispositifs sont beaucoup plus susceptibles d’être adoptés. Ces appareils répondent à peu près aussi vite que nous pouvons pomper le fluide. Le gros avantage est leur efficacité. Nous avons démontré une efficacité contractile allant jusqu’à environ 45%, ce qui est un chiffre très élevé dans le domaine de l’actionnement progressif. »
Les ingénieurs pensent que cette technologie pourrait être utilisée dans des applications de robotique douce, des actionneurs robotiques conventionnels tels que des robots marcheurs, ou potentiellement dans des technologies d’assistance telles que des exosquelettes ou des prothèses.
«Nous prévoyons que les travaux futurs incluront l’utilisation de muscles artificiels cavatappi dans de nombreuses applications en raison de leur simplicité, de leur faible coût, de leur légèreté, de leur flexibilité, de leur efficacité et de leurs propriétés de récupération d’énergie de déformation, entre autres avantages», a déclaré Shafer.
La technologie est disponible pour les licences, les opportunités de partenariat
En collaboration avec l’équipe de NAU Innovations, les inventeurs ont pris des mesures pour protéger leur propriété intellectuelle. La technologie est entrée dans la phase de protection et de commercialisation précoce et est disponible pour des opportunités de licence et de partenariat. Pour plus d’informations, contactez NAU Innovations.
Shafer a rejoint NAU en 2013. Ses autres intérêts de recherche sont liés à la récolte d’énergie, aux systèmes de télémétrie faunique et aux systèmes aériens sans pilote. Feigenbaum a rejoint NAU en 2007, et ses autres intérêts de recherche incluent le cliquet dans les métaux et les matériaux intelligents. Higueras-Ruiz a obtenu sa maîtrise en génie mécanique de la NAU en 2018 et terminera son doctorat. en bio-ingénierie à l’automne. Ce travail a été soutenu par une subvention du programme d’études préliminaires de recherche et développement de la NAU.

Kerry Bennett | Bureau du vice-président de la recherche