

Intel remporte le programme DARPA RACER-Sim
|
Écoutez cet article  |

Le logiciel de simulation de course INTEL permet une modélisation plus rapide des mondes hors route pour les tests ultérieurs de véhicules tout-terrain autonomes. | Crédit : INTEL
La Defense Advanced Research Projects Agency (DARPA) a l’intention de poursuivre l’innovation des véhicules tout-terrain autonomes (véhicules guidés sans pilote AKA). Pour soutenir cet objectif, la DARPA a récemment a attribué à Intel Federal LLC, avec le soutien d’Intel Labs et de ses collaborateurs, du Computer Vision Center Barcelona, en Espagne, et de l’Université du Texas à Austin, l’opportunité de développer des solutions de simulation avancées pour les véhicules terrestres autonomes tout-terrain.
Le nouveau Le programme Robotic Autonomy in Complex Environments with Resiliency – Simulation (RACER-Sim) vise à créer la prochaine génération de plateformes de simulation hors route afin de réduire considérablement les coûts de développement et de combler le fossé entre la simulation et le monde réel.
« Intel Labs a déjà fait des progrès dans l’avancement de la simulation de véhicules autonomes grâce à plusieurs projets, dont le simulateur CARLA, et nous sommes fiers de participer à RACER-Sim pour continuer à contribuer à la prochaine frontière de la robotique tout-terrain et des véhicules autonomes. Nous avons réuni une équipe d’experts renommés du Computer Vision Center et de l’UT Austin dans le but de créer une plate-forme polyvalente et ouverte pour accélérer les progrès des robots terrestres tout-terrain pour tous les types d’environnements et de conditions. mentionné German Ros, directeur du laboratoire des agents autonomes chez Intel Labs.
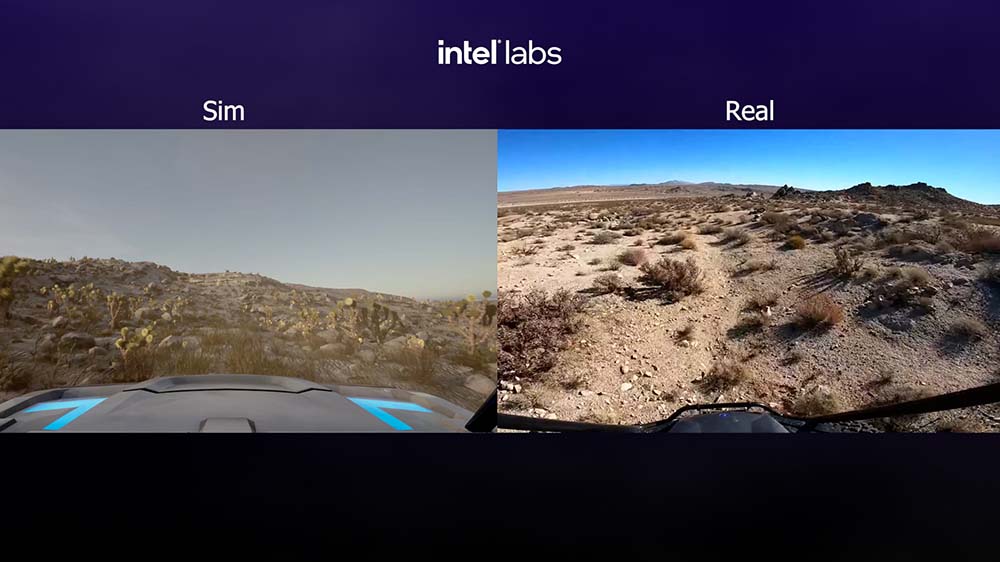
L’objectif de RACER-Sim est de fournir des mondes virtuels haute fidélité dans lesquels développer et tester des véhicules tout-terrain autonomes. | Crédit : INTEL
Le développement de véhicules à conduite autonome tout-terrain est difficile en partie à cause des coûts de construction et de test des véhicules physiques. Et l’écart entre le déploiement sur route et hors route est encore très important.
Bien qu’il existe aujourd’hui de nombreuses options de simulation robotique et de simulation de conduite, peu d’entre elles sont optimisées spécifiquement pour la conduite hors route. Le DARPA Grand Challenge original a été organisé pour la première fois en 2004, et les événements ultérieurs ont contribué à repousser les limites des algorithmes et de la technologie de conduite autonome. Mais ces événements étaient tous des compétitions physiques.
L’objectif de ce nouveau projet est de créer des environnements de simulation avec la fidélité appropriée pour permettre le développement à moindre coût de nouveaux algorithmes, de nouveaux ensembles de capteurs et de nouveaux systèmes pour la conduite autonome hors route.
Il y a défis importants pour la conduite hors route qui diffèrent de la conduite autonome sur route. Cela comprend un manque de réseaux routiers et un terrain extrême avec des rochers et tous les types de végétation, parmi beaucoup d’autres. Ces conditions extrêmes rendent le développement et les tests coûteux et lents.
Le programme RACER-Sim vise à résoudre ce problème en fournissant des technologies de simulation avancées pour développer et tester des solutions, en réduisant le temps de déploiement et la validation des systèmes autonomes alimentés par l’IA.
Le Le projet RACER-Sim comprend deux phases sur 48 mois dans le but d’accélérer l’ensemble du processus de recherche et développement pour la conception de véhicules terrestres autonomes tout-terrain. Dans la première phase, Intel se concentre sur la création de nouvelles plates-formes de simulation et d’outils de génération de cartes qui imitent des environnements hors route complexes avec la plus grande précision (par exemple, la physique, la modélisation des capteurs, la complexité du terrain, etc.), à des échelles jamais vues auparavant.
La création d’environnements de simulation à grande échelle est un processus qui nécessite traditionnellement des ressources importantes et constitue l’un des plus grands défis des workflows de simulation. La plate-forme de simulation d’Intel Labs permettra la personnalisation des futures cartes, y compris la création de nouveaux environnements massifs couvrant plus de 100 000 miles carrés en quelques clics seulement.
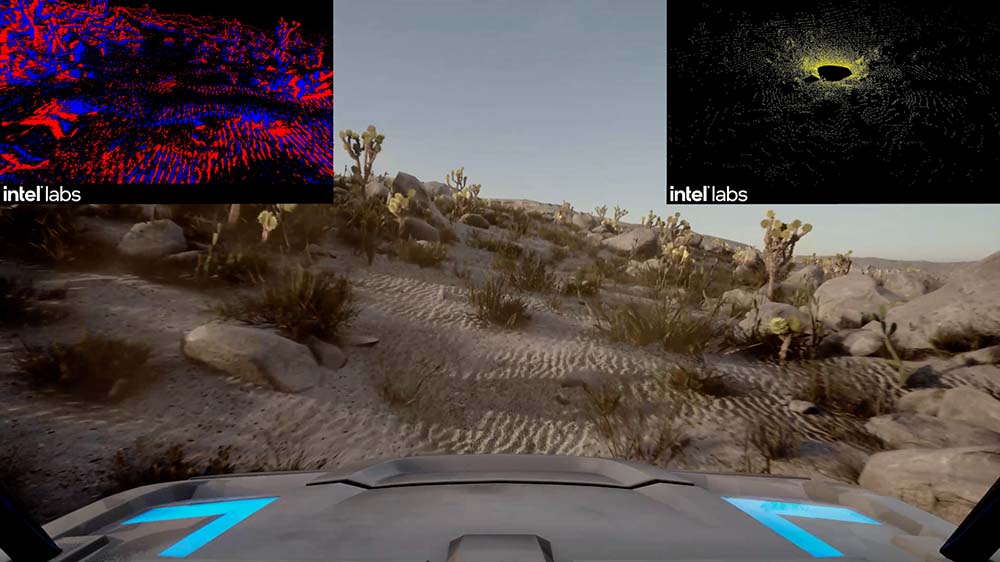
Les simulations basées sur Intel incluent des données de capteur simulées pour permettre de tester des algorithmes de fusion de capteurs et des architectures de contrôle dans un monde virtuel. | Crédit : INTEL
Au cours de la deuxième phase, Intel Labs travaillera avec les collaborateurs de RACER pour accélérer le processus de recherche et développement en mettant en œuvre de nouveaux algorithmes sans l’utilisation d’un robot physique. Ensuite, les équipes valideront les performances du robot en simulation, économisant ainsi un temps et des ressources considérables.
La deuxième phase comprendra également le développement de nouvelles techniques sim2real – le concept d’entraînement du robot en simulation pour acquérir des compétences, puis le transfert de ces compétences à un système robotique réel correspondant – permettant la formation de véhicules terrestres autonomes tout-terrain directement en simulation.
Intel s’attend à ce que ces nouveaux outils de simulation améliorent considérablement le développement de systèmes autonomes utilisant des tests virtuels, ce qui réduit les risques, les coûts et les retards associés aux protocoles de test et de vérification traditionnels. À l’avenir, la plate-forme de simulation ira au-delà de la validation pour créer des modèles d’IA prêts à être mis en œuvre dans le monde réel.
https://www.youtube.com/watch?v=ysm7C65qdec