

Une nouvelle stratégie d’IA permet aux robots de s’adapter rapidement aux environnements du monde réel

9 juillet 2021 par Sarah Yang
Les services de livraison peuvent être en mesure de surmonter la neige, la pluie, la chaleur et la pénombre de la nuit, mais une nouvelle classe de robots à pattes n’est pas loin derrière. Des algorithmes d’intelligence artificielle développés par une équipe de chercheurs de l’UC Berkeley, de Facebook et de l’Université Carnegie Mellon dotent les robots à pattes d’une capacité accrue à s’adapter et à naviguer sur un terrain inconnu en temps réel.
Leur robot de test a traversé avec succès le sable, la boue, les sentiers de randonnée, les hautes herbes et les tas de terre sans tomber. Il a également surpassé les systèmes alternatifs en s’adaptant à un sac à dos lesté jeté sur le dessus ou à des pentes glissantes et huileuses. En descendant des marches et en grimpant sur des tas de ciment et de cailloux, il a atteint respectivement des taux de réussite de 70 % et 80 %, ce qui reste un exploit impressionnant compte tenu du manque d’étalonnages de simulation ou d’expérience préalable avec les environnements instables.
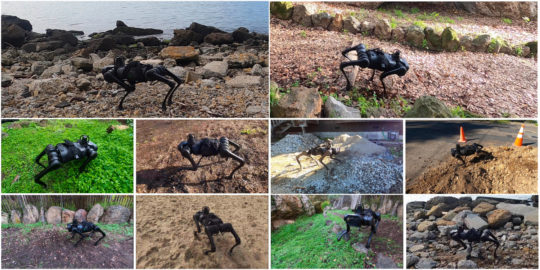
Le robot de test activé par Rapid Motor Adaptation traverse divers types de terrain. (Images avec l’aimable autorisation de Berkeley AI Research, Facebook AI Research et Carnegie Mellon University)
Non seulement le robot pourrait s’adapter à de nouvelles circonstances, mais il pourrait également le faire en quelques fractions de seconde plutôt qu’en quelques minutes ou plus. Ceci est essentiel pour un déploiement pratique dans le monde réel.
L’équipe de recherche présentera le nouveau système d’IA, appelé Rapid Motor Adaptation (RMA), la semaine prochaine lors de la conférence 2021 Robotics: Science and Systems (RSS).
« Notre idée est que le changement est omniprésent, donc dès le premier jour, la politique de RMA suppose que l’environnement sera nouveau », a déclaré Jitendra Malik, chercheur principal de l’étude, professeur au département de génie électrique et d’informatique de l’UC Berkeley et chercheur à l’Université de Berkeley. le groupe Facebook AI Research (FAIR). « Ce n’est pas une réflexion après coup, mais une prévoyance. C’est notre sauce secrète.
Auparavant, les robots à pattes étaient généralement préprogrammés pour les conditions environnementales probables qu’ils rencontreraient ou enseignés à travers un mélange de simulations informatiques et de politiques codées à la main dictant leurs actions. Cela pourrait prendre des millions d’essais – et d’erreurs – et rester en deçà de ce à quoi le robot pourrait être confronté dans la réalité.
« Il est peu probable que les simulations informatiques capturent tout », a déclaré l’auteur principal Ashish Kumar, titulaire d’un doctorat à l’UC Berkeley. étudiant dans le laboratoire de Malik. «Notre robot compatible RMA montre de fortes performances d’adaptation à des environnements jamais vus auparavant et apprend cette adaptation entièrement en interagissant avec son environnement et en apprenant de l’expérience. C’est nouveau.
Le système RMA combine une politique de base – l’algorithme par lequel le robot détermine comment se déplacer – avec un module d’adaptation. La politique de base utilise l’apprentissage par renforcement pour développer des contrôles pour des ensembles de variables extrinsèques dans l’environnement. Cela s’apprend en simulation, mais cela ne suffit pas à lui seul pour préparer le robot à pattes au monde réel, car les capteurs embarqués du robot ne peuvent pas mesurer directement toutes les variables possibles dans l’environnement. Pour résoudre ce problème, le module d’adaptation demande au robot de se renseigner sur son environnement en utilisant des informations basées sur ses propres mouvements corporels. Par exemple, si un robot sent que ses pieds s’étendent plus loin, il peut supposer que la surface sur laquelle il se trouve est molle et adaptera ses prochains mouvements en conséquence.
La politique de base et le module d’adaptation sont exécutés de manière asynchrone et à des fréquences différentes, ce qui permet à RMA de fonctionner de manière robuste avec seulement un petit ordinateur de bord.
Les autres membres de l’équipe de recherche sont Deepak Pathak, professeur adjoint à l’École d’informatique de la CMU, et Zipeng Fu, étudiant à la maîtrise dans le groupe de Pathak.
Le projet RMA fait partie d’une collaboration industrie-université avec le groupe FAIR et le laboratoire Berkeley AI Research (BAIR). Avant de rejoindre la faculté CMU, Pathak était chercheur à FAIR et chercheur invité à UC Berkeley. Pathak a également obtenu son doctorat. diplôme en génie électrique et informatique de l’UC Berkeley.
Apprendre encore plus: